Koopman Operator for Uncertain Systems
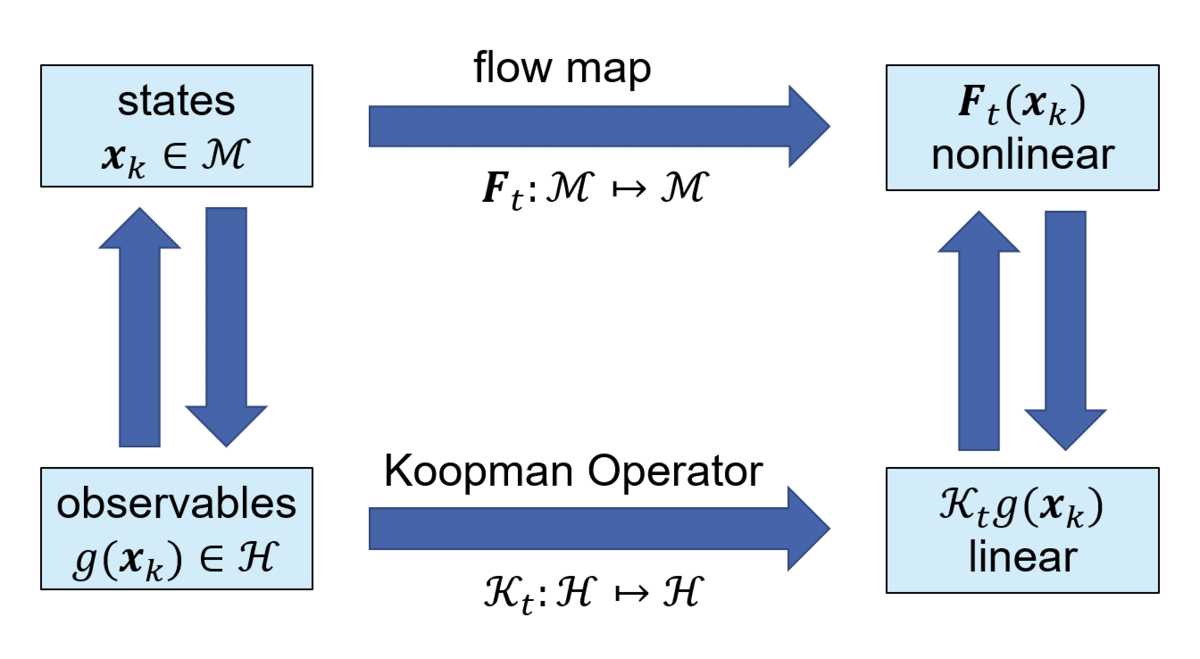
In the classical modeling of dynamical systems using the flow map, the state at some point in the future is predicted depending on the current state of the system. Conversely, the flow map advances the state of the system forward in time. However, this very successful modeling method has the disadvantage that the flow map is usually non-linear for practical systems. This non-linearity causes some problems in practice, especially with regard to the simulation and control of such systems.
However, there are alternative approaches to modeling the dynamics of a system that do not involve nonlinearity. One such approach is based on the Koopman operator. Unlike the flow map, this operator does not act directly on the state of the dynamical system. Instead, it acts on the so-called „observable functions“. These are actually a set of functions that are themselves dependent on the state of the dynamical system. The Koopman operator now pushes the values of these observable functions forward in time. The advantage of this mapping is its linear nature. The disadvantage, however, is severe: The Koopman operator has in general the dimension of infinity.
The approximation of the Koopman operator in finite dimensions introduces an error. This error depends, among other things, on whether the subspace in which the approximated operator lies is invariant with respect to the action of the true Koopman operator.
In this research, we study Koopman operators and their spectral decomposition for uncertain nonlinear systems. When the system to be described is itself uncertain, e.g. the system has uncertain parameters, this uncertainty is propagated to the Koopman operator. It is investigated how this uncertainty can be quantified. In addition, the approach is used for an outer-loop application.
Contact: ,